整合更多样化的传感器與更加复杂的实时机械视觉分析
因自动导引车须布署在事先规划的环境,整体布署成本较高,也较难应付意外状况,如运输过程中一旦遇到障碍物只能暂停运作,所以随着自驾车导航技术的成熟,拥有自主导引、机器视觉、和地图建构能力的自主移动机器人,可自动判断×有效的路径并绕开障碍物。对于更复杂的厂房与仓储布局,更需要AMR的越障能力与环境适应性。
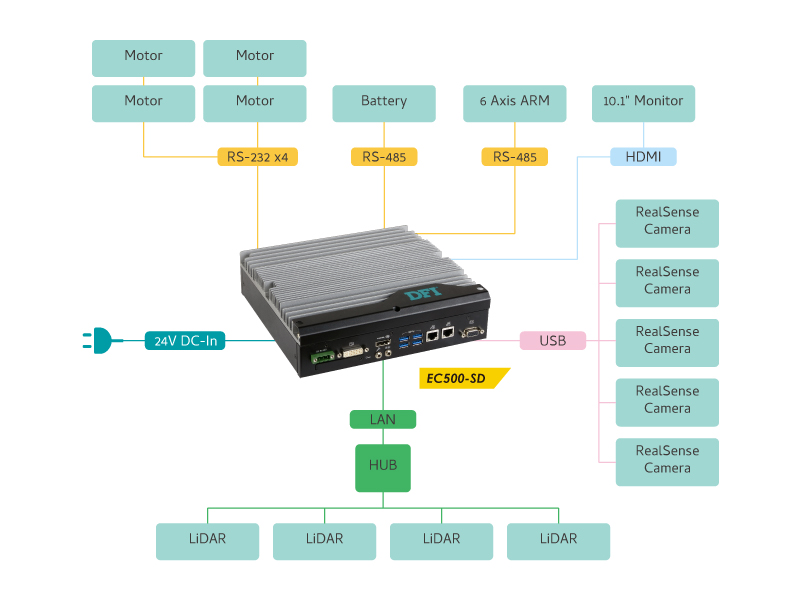
但自主移动机器人需要整合更多样化的传感器,包含定位用的深度摄影机与激光雷达、防止长距离碰撞的雷射扫描仪、与侦测短距离碰撞的超音波传感器,各类无线网络规格与控制驱动技术也是必备的需求。台湾某间世界知名的芯片封测业者,原本采用的工业计算机方案,遭遇了COM埠和USB埠数量不足以符合需求,须外接额外控制器的状况。
此外,除了须完美整合繁杂的传感器,自主移动机器人须执行更加复杂的实时机械视觉分析,以及同时定位与环境地图建立 (SLAM, Simultaneous Localization and Mapping) 算法,也需要客制化应用程序界面 (API, Application Programming Interface) 和更高的操作系统整合度,确保滴水不漏的兼容度,并发挥×大的执行效能。×后,因晶圆封测业者的产线作业需求,须安装工业用显示器,这也意味着需要来自工业计算机厂商的系统整合服务 (SI, System Integration),以便打造出设计×完善的新型自主移动机器人。